Die Idee
Cosmo war der Versuch, einen autonomen Pflanzenroboter zu bauen, der mehrere Pflanzmodule selbstständig überwacht und bewässert. Statt einfacher statischer Sensorik entstand daraus schnell ein vollständiger SCARA-Roboter mit Kamerasystem, Bewässerung und modularer Toolhead-Idee.
Der Aufbau sollte vier Pflanzgefäße anfahren, deren Feuchtigkeit messen und sie gezielt bewässern. Zusätzlich war geplant, über die Kamera das Wachstum der Pflanzen zu dokumentieren und perspektivisch weitere Werkzeuge über magnetische Toolheads anzubinden.
Im Verlauf entwickelte sich das Projekt allerdings immer stärker in Richtung Robotik-Plattform. Mechanik, Kinematik und der eigentliche Arm wurden interessanter als die ursprüngliche Pflanzenautomatisierung selbst.
Mechanischer Aufbau
Die Basis des Systems besteht aus einem SCARA-ähnlichen Roboterarm mit zwei rotatorischen Freiheitsgraden. Besonderheit dabei: Beide Motoren sitzen fest in der Basis.
Der erste Freiheitsgrad wird direkt über einen GT2-Riemen zum ersten Gelenk übertragen. Für den zweiten Freiheitsgrad läuft die Kraftübertragung ebenfalls aus der Basis heraus, allerdings zunächst vollständig durch den ersten Armabschnitt hindurch. Über Wellen- und Hohlwellen-Konstruktionen gelangt die Rotation schließlich bis zum zweiten Gelenk.
Dadurch blieb die bewegte Masse vergleichsweise gering, da keine schweren Motoren auf den rotierenden Armsegmenten sitzen mussten.
An den Gelenken wurden magnetische Encoder zur Winkelmessung verbaut. Zusätzlich existieren Endschalter zur Referenzierung des Systems.
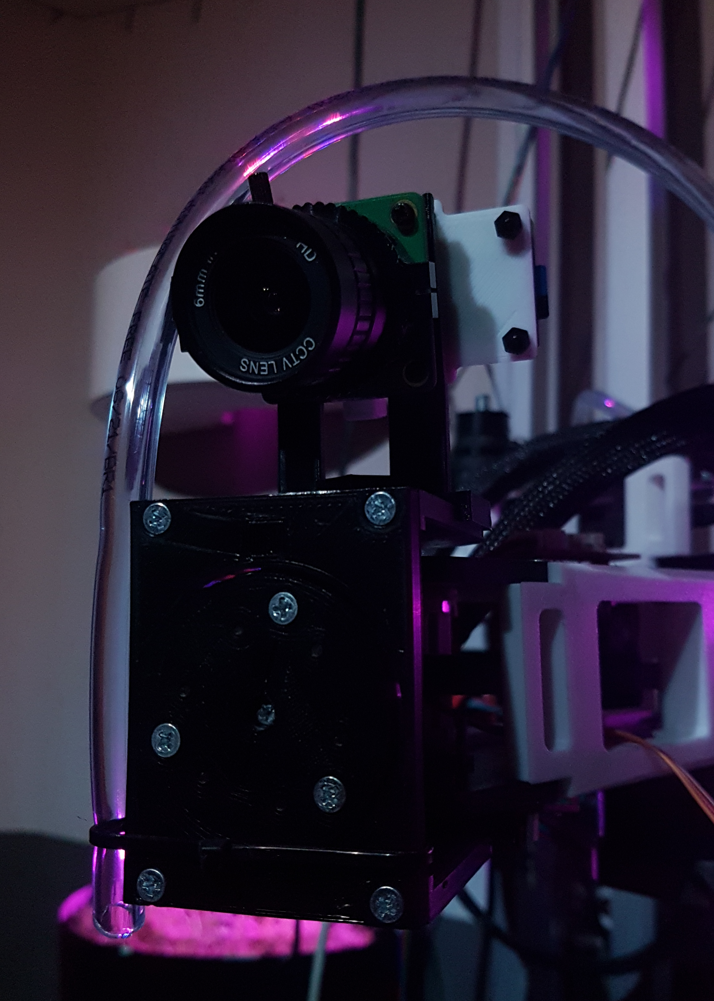
Am Ende des Arms befindet sich ein kurzes Zusatzgelenk mit Kameraeinheit, Wasserschlauch und einer vorgesehenen magnetischen Werkzeugaufnahme für wechselbare Toolheads.
Vertikale Achse
Der komplette Roboterarm sitzt auf zwei vertikalen Aluminium-Vierkantprofilen. Über eine oben montierte Seilwinde sollte die gesamte Konstruktion zusätzlich in der Höhe verfahren werden.
Dadurch wäre der Arbeitsbereich nicht nur planar geblieben, sondern hätte sich auf mehrere Ebenen erweitern lassen. Geplant war unter anderem, unterschiedlich hohe Pflanzmodule oder Regalebenen anzufahren.
Die vertikale Achse wurde mechanisch aufgebaut, allerdings nie vollständig softwareseitig integriert.
Pflanzenmodule
Die Pflanzgefäße entstanden als separate Module mit integrierter Pflanzenbeleuchtung. Die violett-pinken Grow-LEDs gaben dem gesamten System später einen fast schon futuristischen Look.
Ursprünglich standen Funktion und Sensorik im Vordergrund. Mit der Zeit wurde Cosmo allerdings zunehmend zu einer Mischung aus Robotik-Prototyp und dekorativem Indoor-Gewächshaus.
Besonders interessant war dabei, wie stark sich das Projekt visuell entwickelte. Obwohl viele der geplanten Automatisierungsfunktionen nie vollständig umgesetzt wurden, entstand am Ende trotzdem ein überraschend stimmiges Gesamtsystem.
Elektronik & Steuerung
Große Teile der Mechanik wurden im 3D-Druck gefertigt. Der Aufbau kombinierte gedruckte Strukturteile mit Aluminiumprofilen, GT2-Riemenantrieben und verschiedenen Eigenkonstruktionen für Lagerung und Gelenke.
Die Sensorik bestand hauptsächlich aus:
- magnetischen Encodern an den Gelenken
- Endschaltern zur Referenzierung
- geplanter Feuchtigkeitssensorik für die Pflanzmodule
Die Kameraeinheit war dauerhaft am Toolhead montiert und sollte später zur Dokumentation oder Pflanzenerkennung genutzt werden.
Warum das Projekt beendet wurde
Technisch funktionierte der SCARA-Roboter tatsächlich erstaunlich gut. Die Gelenke liefen sauber, die Kinematik funktionierte und der Arm konnte die Pflanzmodule zuverlässig anfahren.
Trotzdem wurde das Projekt letztlich eingestellt. Nicht wegen eines großen technischen Problems, sondern schlicht weil das Interesse langsam verloren ging.
Wie bei vielen Langzeitprojekten verschob sich der Fokus irgendwann stärker auf neue Ideen und andere Themen. Zurück blieb allerdings ein funktionierender Roboterarm und ein ziemlich außergewöhnlich aussehendes Blumenbeet mit Robotik-Ästhetik.