Warum überhaupt
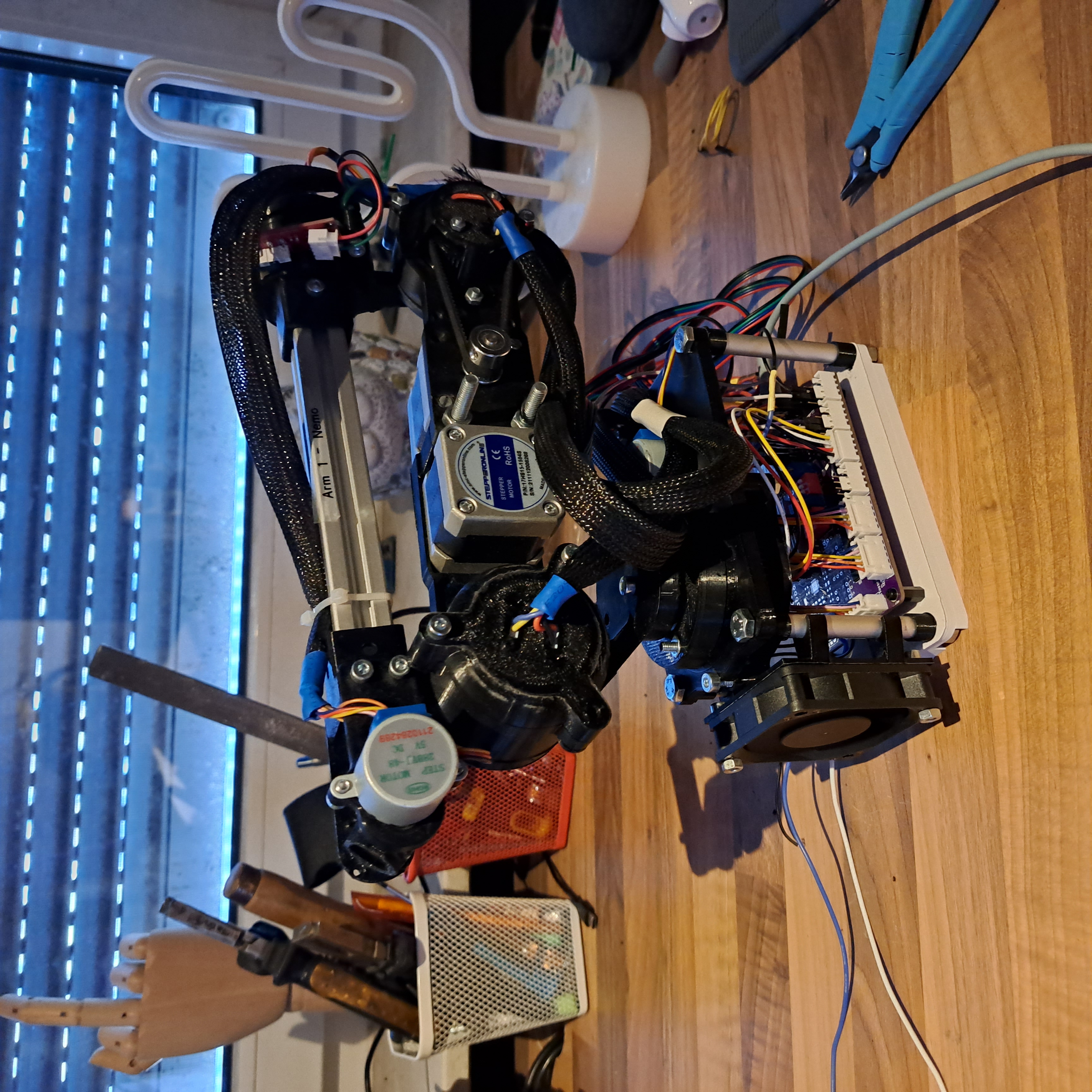
Der Antrieb war simpel: ich wollte verstehen, wie Roboterarme funktionieren. Nicht aus einem Buch, sondern durch Bauen. Nemo V2 ist das Ergebnis — der Name kommt vom beschrifteten Arm-Segment auf dem ersten Foto, irgendwann hat sich das festgesetzt.
Das Ziel war nie ein produktionsreifer Arm. Das Ziel war: machen, scheitern, besser machen.
Die sechs Gelenke
Der Arm hat sechs Freiheitsgrade, jedes Gelenk mit seiner eigenen Geschichte:
- Gelenk 1 — Basis-Rotation
- 28BYJ-48 Schrittmotor. Klein, günstig, ausreichend für die Basis. Das Drehmoment ist hier am wenigsten kritisch.
- Gelenk 2 & 3 — Schulter und Ellbogen
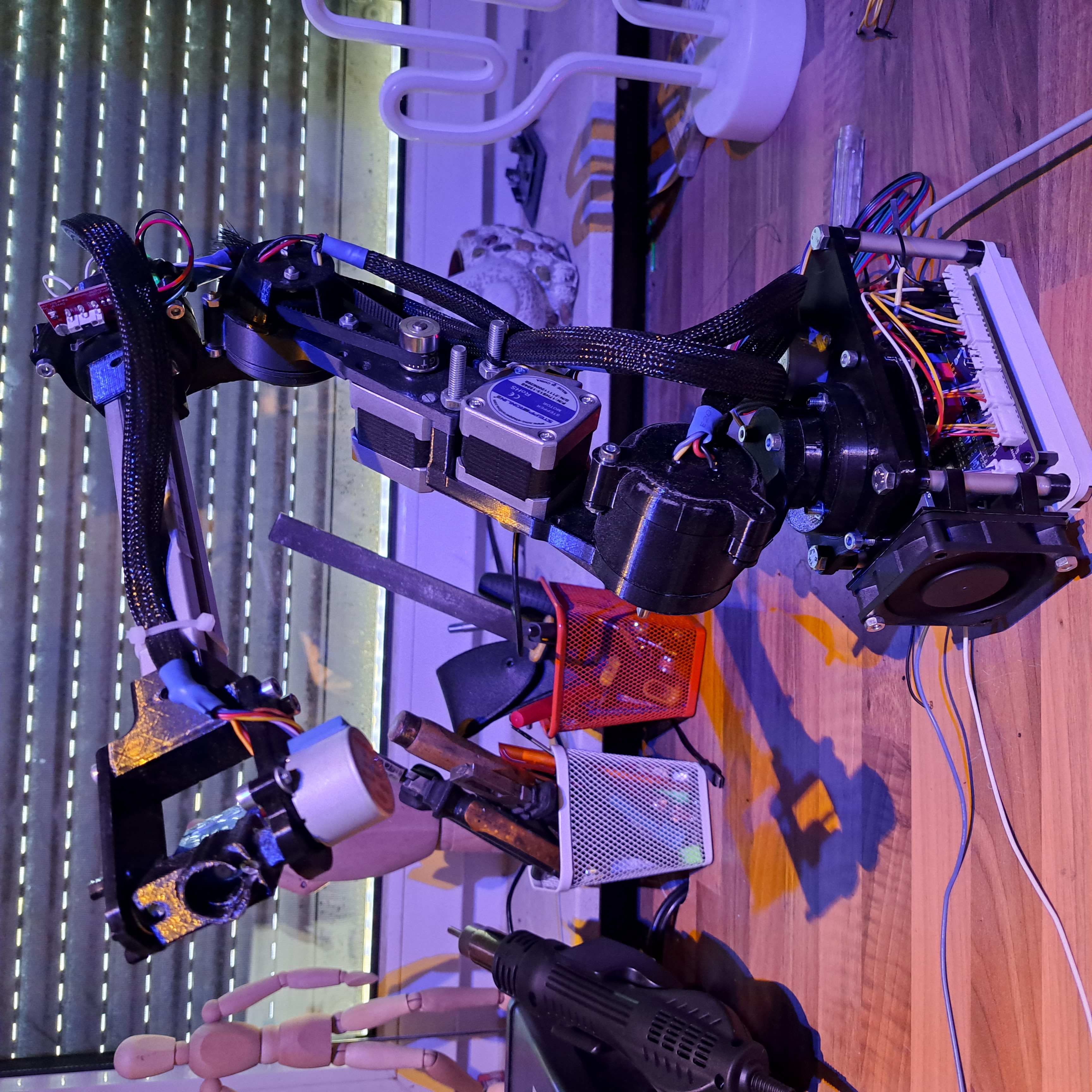
- Nema 17, zuerst mit Riemenübersetzung, später mit einem Zykloidgetriebe direkt im Gelenk. Das war der interessanteste Teil des Projekts — und der mit den meisten Fehldrucken. Beide Gelenke haben Magnetencoder für Positionsfeedback.
- Gelenk 4 & 5 — Handgelenk
- Wieder 28BYJ-48. Gelenk 4 hat zusätzlich Endlagenschalter für ein definiertes Homing. Die anderen Gelenke laufen ohne — was in der Praxis meistens funktioniert.
- Gelenk 6 — Greifer-Rotation
- Ein einfacher Servo. Kein Encoder, kein Feedback. Hat trotzdem seinen Job gemacht.
Das Zykloidgetriebe
Der Wechsel von Riemen auf Zykloid bei Gelenk 2 und 3 war ein größerer Schritt als erwartet. Zykloidgetriebe haben praktisch kein Spiel, hohe Untersetzung auf kleinem Raum — klingt ideal für ein Gelenk. Ist es auch, aber der Druck muss sitzen. Erste Versuche hatten zu viel Reibung, zu wenig Spiel, oder beides gleichzeitig. Iteration vier oder fünf hat dann funktioniert.
Das Zykloidgetriebe war rein aus Interesse drin — für einen Arm dieser Größe hätte ein Riemen auch gereicht. Manchmal baut man Dinge, weil man sie verstehen will.
Elektronik und Steuerung
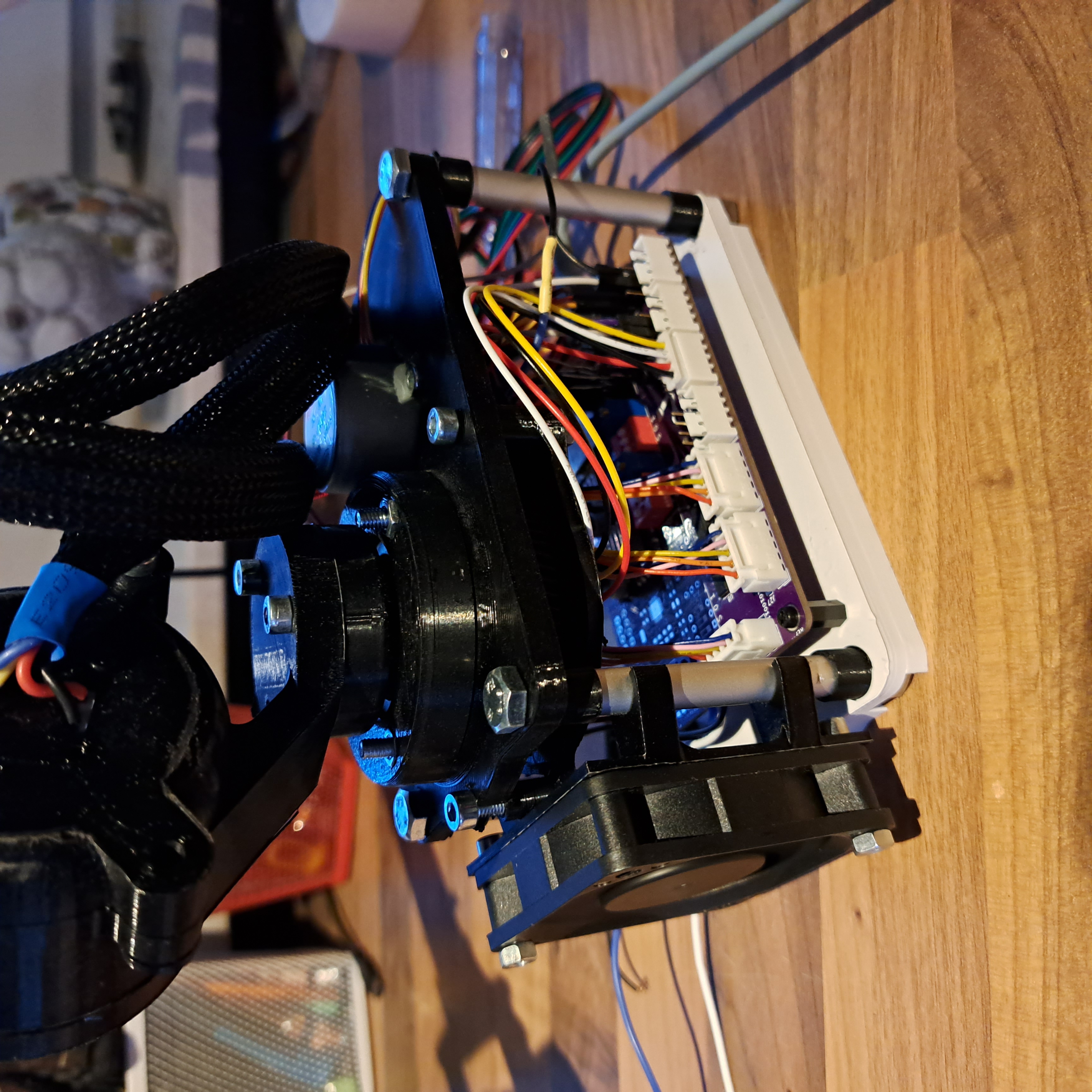
Die Steuerung läuft auf einer selbstgebauten Platine — mehr dazu in einem eigenen Post. Alles sitzt in der weißen Basis unter dem Arm: Treiber, Controller, Verkabelung. Der große 120-mm-Lüfter an der Seite war nötig, weil die Treiber ohne aktive Kühlung unangenehm warm wurden.
Die Kabelführung in Geflechtschlauch macht den Arm optisch ordentlicher als er intern ist. Innen ist es ehrlich gesagt ziemlich eng.
Was ich mitgenommen habe
Der Arm funktioniert. Er kann Positionen anfahren, hält sie, und homet reproduzierbar. Das war das Ziel.
Was ich nicht hatte: einen Plan für die Software-Seite, bevor die Hardware stand. Das hat zu einigen Umwegen geführt. Beim nächsten Projekt würde ich früher über Kinematik nachdenken — nicht weil es zwingend nötig ist, sondern weil es hilft, mechanische Entscheidungen besser zu treffen.
Ansonsten: der Weg war das Ziel. Nemo V2 hat mehr gelehrt als jedes Tutorial.